V-REP 实现 Bubble Rebound 算法
V-REP 是一款较为易用的机器人仿真软件。它拥有 4 个不同的物理引擎,可以较好地进行动力学仿真。
首先,参考官方教程建立 bubbleRob 机器人模型。为了方便实现 Bubble Rebound 算法,还要添加几个额外的接近传感器。
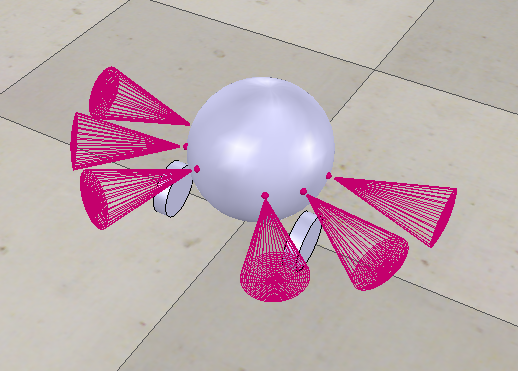
模型建立好了之后,就可以开始着手实现 Bubble Rebound 避障算法了。Bubble Rebound 是一个很简单的避障算法,该论文可以在 IEEE Xplore 上找到。简单来说,首先对距离传感器进行编号。以上图为例,最左边的传感器为 3 号,向右依次为 2,1,-1,-2,-3 。论文的插图给出了一侧四个传感器的例子:
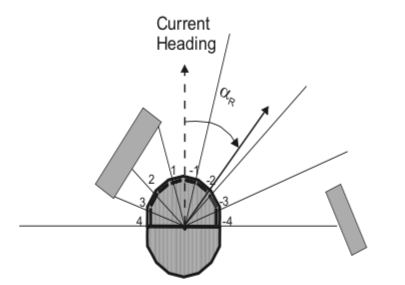
之后,根据文章中给出的公式可以计算出机器人应该旋转的角度。大体思路是,如果左边有障碍物,那么正数部分就会因为距离较小而较小,从而计算得到一个负数的角度。在机器人 z 轴向上的情况下,旋转一个负数的角度即转向没有障碍物的右侧。
但是在 V-REP 中使用内建的 Lua 脚本控制机器人旋转某个角度的实现中,有一点需要注意。旋转某个角度的思路大概如下:在一个循环中,给机器人的两个轮子施加不同的速度,不断对比当前的转角与目标转角,直至达到目标。需要注意的是,如果新建的是非多线程脚本,那么这个循环就会阻塞住仿真线程。仿真过程被阻塞住,也就无法让机器人旋转;机器人不旋转,我们的循环就无法退出,从而造成机器人不转、仿真不进行的尴尬局面。
为了解决这个问题,就要使用多线程脚本。同时,也可以调用 sim.switchThread() 提前切换线程来得到更好的性能。进一步地说,Lua 本身并不是使用的多线程来进行的并行操作,而是使用了协程(coroutine)。多个协程在同一个线程中,可在子程序内部中断,去执行其他子程序,再返回,而不是函数调用(函数调用也可以算作协程的一种特殊状态)。因为是在同一个线程中,且由程序自身控制切换(线程、进程的切换由调度器来进行,程序员干预较少),因此效率非常高,没有线程转换的开销;不需要担心资源抢占,无需锁机制。多个子程序协作完成任务(而非抢占),故称为协程(co-routine)。
完整代码可参见我的 GitHub。