First Time Using a Total Station
全站仪(Total Station)是一种可以用来测量物体到机器角度、距离等数据的仪器。学土木工程或测绘的同学们对它都非常熟悉,但是作为一个 ECE 专业的学生,平时的确没什么机会接触到全站仪,感觉很好玩因此简单记录一下。
原理
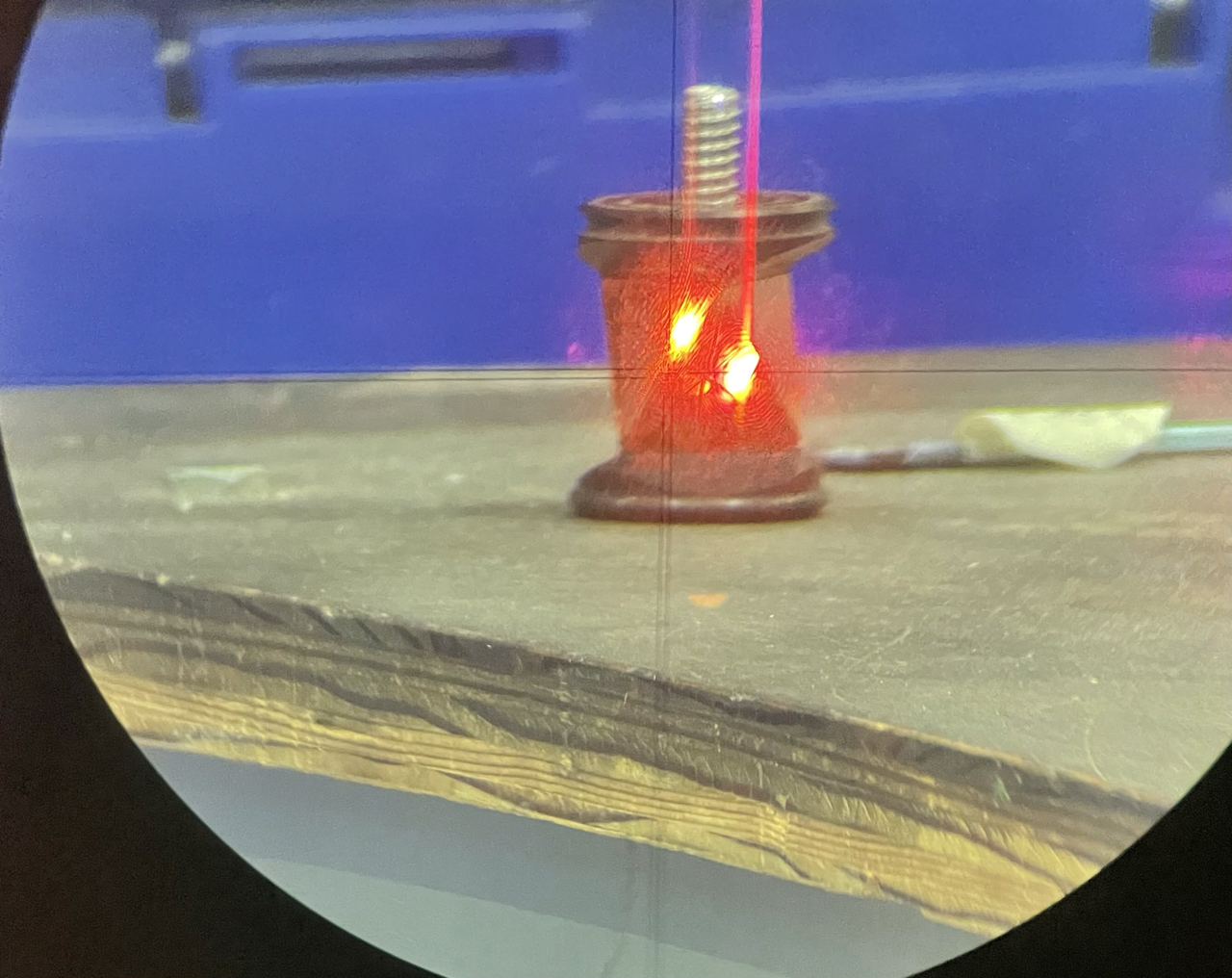
全站仪通过发射红外激光照射到棱镜上,计算反射回来的光线相位差来得到距离,误差非常小,可达到 0.1mm 的级别。中间黑色的部分是一个望远镜,用来瞄准棱镜。固定之后,可以左右、上下旋转进行瞄准。也可以打出一个红色的激光点来辅助瞄准。底部的支架末端是尖的,在野外测绘时可以插入泥土方便固定。由于我们是在室内,为了防止打滑,因此额外使用了一个底座方便固定。

棱镜(prism)用来接收激光,并按相同的光路反射回去。它的底部有一截螺杆,用来固定。棱镜长这样:

操作
装上电池开机后,首先调整旋钮,让全站仪水平。之后左右转动仪器,并用旋钮上下转动仪器,通过望远镜的目镜瞄准远处的棱镜。我打开了红色激光来辅助瞄准,因此对准棱镜后能看到强烈的反射光线。
之后按照屏幕提示,点击 Go to work,进入 Total Station Setup 界面。选择 Set orientation (Station is known. Aim at a target to set the orientation)。之后输入原点坐标。这里有一个小技巧是可以把 Northing、Easting 和 Elevation 分别设置为 1000、2000 和 3000,这样后续使用数据时,就能很快反应过来是对应的哪个数据(当作 magic number)。当然设置成全 0 也是没问题的。之后选择棱镜的型号,我用的这款是 Leica Mini 360。
设置完成后,再次点击 Go to work,选择 Survey 进入测绘模式。由于已经对准棱镜,点击 Dist 按钮,机器就会测量出距离、角度等信息。
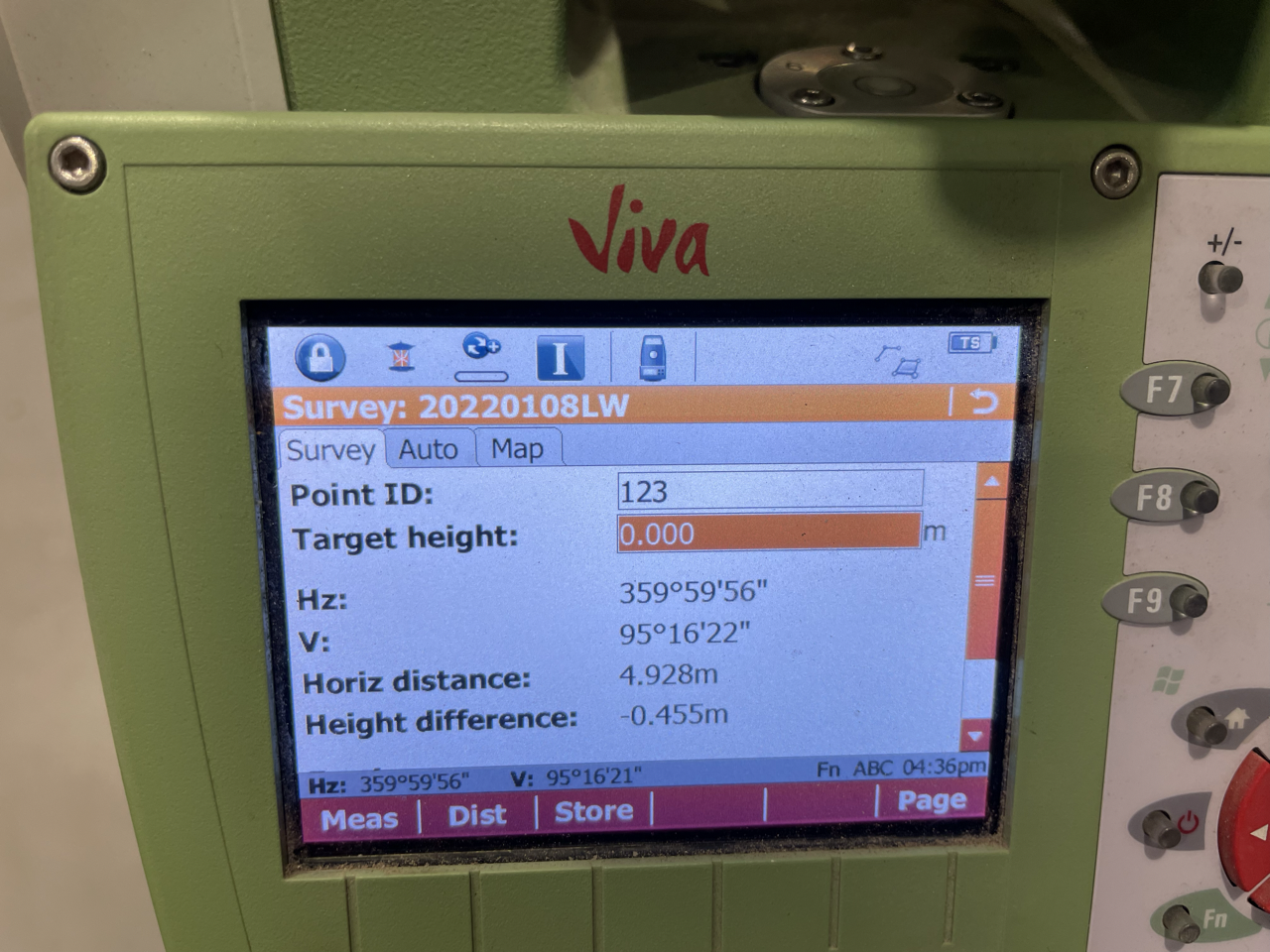
可以看到,棱镜距离机器的水平距离是 4.9 米。
锁定跟踪
全站仪最有意思的地方是它可以锁定并自动跟踪棱镜。左上角的🔒图标表示当前棱镜已锁定,这个时候移动棱镜,机器就会自动旋转追踪。如果离得比较远,即使棱镜的移动速度较快,也不会跟丢(感谢某清华 PhD 友情出镜)。
![]()
数据导出
测量的数据可以用 U 盘拷出。也可以将 USB 连接到电脑上实时获取数据,并通过 ROS 以 2hz 的频率发布。这样棱镜安装在机器人上,就可以实时得到机器人的准确位置信息了。