Calculate Absolute Trajectory Error with ROS
Absolute Trajectory Error (ATE) 是衡量 SLAM 算法的一个重要指标。它描述了 SLAM 估计出来的机器人路径和 ground truth 之间的差异大小。显然 SLAM 算法的表现越好,那么估计出来的路径误差就会越小。
ATE 是一个评估全局性能的指标,它需要让机器人走较长的一段距离。另一个衡量局部准确性的指标是 Relative Pose Error (RPE)。
ATE 定义
Ground truth 路径和机器人估计的路径很可能不在同一个坐标系下。比如,我们可以用 total station (全站仪) 来精确的获取机器人的位置从而用作 GT,坐标系的原点默认会在全站仪所处的位置。而机器人往往用最开始的几帧定义世界坐标系的原点。即使修改全站仪的设置,使得原点的位置在机器人的初始位置,由于全站仪不能测量旋转姿态,同样无法保证两个坐标系重合。所以我们需要通过 Horn’s method 寻找一个变换矩阵,将两个轨迹对齐。给定 3 对以上的匹配点,Horn’s method 可以找到最优的变换矩阵来最小化误差,而且这是一个闭式解 (closed form solution)。
时刻 i 的 ATE error matrix 定义为:
$$
E_i := Q_i^{-1}SP_i
$$
其中,Q 表示 GT,P 表示估计的轨迹,S 表示找到的刚体变换矩阵。注意这里的 E 是误差矩阵,其中包括旋转误差和平移误差。
全部轨迹的 ATE 可以用 root mean square error 表示:
$$
ATE_{rmse} = \left( \frac{1}{n} \sum_{i=1}^n || trans(E_i) || ^2 \right)^{\frac{1}{2}}
$$
其中 trans 表示 matrix E 中的 translation 部分,即我们不考虑 rotation。
实际使用
TUM 的 researcher 开源了一组实用的 benchmarking toolbox。然而其实现使用的是 Python 2,不过只需要稍做改动就可以迁移到 Python 3,还算比较容易。但是我们需要先将轨迹点转换到它需要的格式。
首先,假设机器人的位姿是通过 ROS TF 广播的,我们可以先录制一个只包含 /tf topic 的 ROS bag:
1 | rosbag record /tf |
解析 ROS bag 比较费劲,但我们可以直接把它导出成 CSV 的格式,这样就很容易解析了:
1 | rostopic echo -b <your_bag_name>.bag -p /tf > tf.txt |
文件内容大概这样:
1 | %time,field.transforms0.header.seq,field.transforms0.header.stamp,field.transforms0.header.frame_id,field.transforms0.child_frame_id,field.transforms0.transform.translation.x,field.transforms0.transform.translation.y,field.transforms0.transform.translation.z,field.transforms0.transform.rotation.x,field.transforms0.transform.rotation.y,field.transforms0.transform.rotation.z,field.transforms0.transform.rotation.w |
之后可以用一个 Python 脚本把 world - body 的位姿关系转换成所需的格式:
1 | import csv |
转换之后的文件就只包括时间戳和 x,y,z 位置了:
1 | 164556498.8578114,-0.0237263019323,-0.183226266184,0.0574725730104 |
对 GT 进行类似操作后,就可以使用 TUM 的工具来计算 ATE 了:
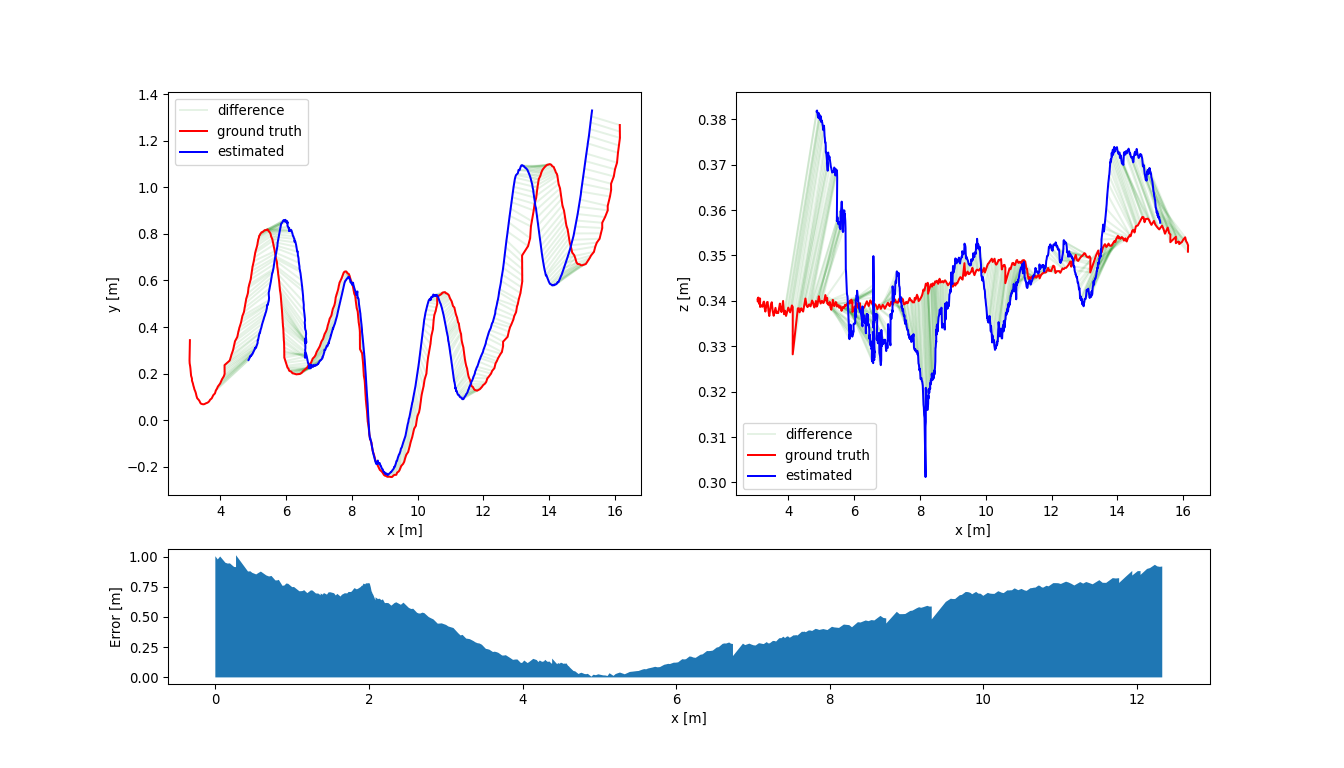
1 | evaluate_ate.py ./pos_ate.csv ./tf_ate.csv --plot result.png |
最终结果如下(对绘图代码有改动):